纹理缓存
参考文献:
介绍
纹理缓存是现代GPU的基础组件,是实现实时渲染的性能的重要部分。
纹理缓存对GPU来说是Read-Only的。主要在texture-mapping阶段由GPU程序读取。
纹理缓存有很高的命中率,因为相邻像素之间有大量的重用,而且通常位于着色器处理器附近,所以纹理数据具有高吞吐量和低读延迟。
GPU的架构对程序员是不可见的,特备隐藏在API之下,这些架构包括纹理缓存被频繁的更新,基础的架构如图所示,L1和L2共同构成了GPU的分级内存: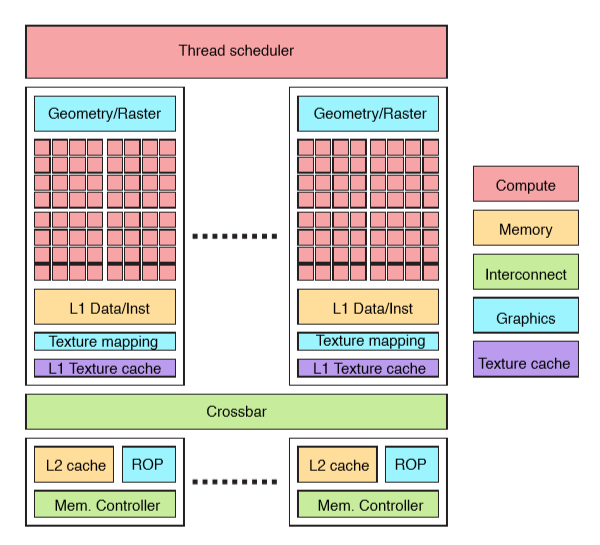
关于上图的描述:
紫色的部分是Texture Cache。 从最上边开始看,Thread Scheduler为不同的图形处理阶段收集任务。然后把任务安排到不同的Graphic Core上。 Graphic Core有一些固定功能的图像逻辑(Geometr,Raster),包括了几个处理功能和光栅化功能。 接着是Shader,包括了逻辑控制和ALU单元阵列,用于以SIMD的方式处理shader程序。Shader执行阶段使用了L1 数据指令Cache、texture mapping和与其关联的L1Texture Cache。Shader的输出和L1和L2之间需要通过crossbar来传输。 Crossbar连接了各种内存单元,包括L2Cache、ROP和内存控制器。内存控制器链接在了保存了framebuffer的外部内存上。大部分相邻的blocks是彼此链接的。
为了理解对纹理缓存的需求,我们首先要了解影响纹理缓存的功能:texture mapping和rasterization.
Texture Mapping
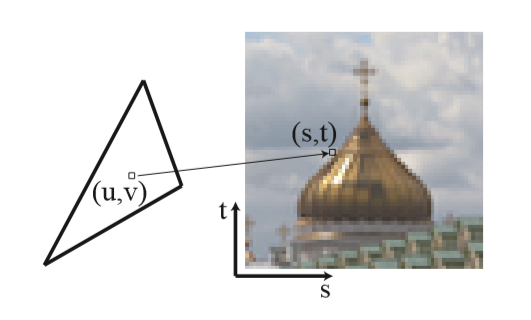
纹理映射指获取图像数据并将其填充到几何表面的过程。屏幕上的每一个像素需要在纹理当中找到对应的图像数据。在贴图上的一个像素称为一个纹素。模型每一个顶点保存了一个贴图上的2D位置。这些位置称为纹理坐标,uv表示。这个坐标用来查找纹理贴图上的像素位置,st坐标下的位置。
通过整数坐标来查找单个颜色叫做nearestfiltering,并且可能产生走样。为了避免走样,通常使用邻域像素进行滤波,常用的滤波是bilinear。这个平滑操作可以解决纹理映射时产生的走样,但是无法解决纹理缩小时产生走样。
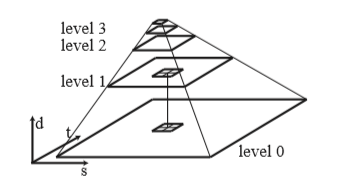
解决纹理所缩小的走样问题需要时用mipmap技术。Mipmap预先滤波是将纹理贴图生成一系列分辨率减半的贴图,构成一个图像金字塔。Trilinear mipmap是通过搜索金字塔相邻两层的贴图,然后在每个贴图上进行bilinear插值之后再用这两个值进行线性插值,最终会得到Trilinear滤波结果。下图可以看到在level0和level1上选择的2*2的像素进行bilinear 滤波。为了选择这两张贴图,需要计算lod值。lod值的计算需要计算相邻2*2像素的所对应的纹理坐标的偏差。
Rasterization
光栅会是将三角形转换成屏幕像素的过程,三角形是GPU使用的基本图元,通过限制使用三角形进行光栅化,算法可以根据硬件实现优化。最简单的像素生成顺序就是从上到下进行水平臊面。这个方法很直观,但这个不是最有的方法,所以通常顺序会进行修改来改进效率。
** GPU的光栅化会把屏幕像素分成2*2的block,通常也称作QUAD。每一个像素保存了uv坐标和纹理梯度,纹理梯度是 $ \frac{ \delta u }{ \delta x} $ 等内容,是通过计算邻域像素纹理坐标的差值得到的。这些纹理梯度,用于计算LOD。如果一个三角形没有覆盖完整的quad,GPU也会为空的像素产生开销,也就是会占据GPU计算引擎的空间。这回导致单一像素的三角形对于GPU来说十分低效,但是也有一些解决方案提出来。 **
有关Texture Mapping和光栅化的更多的细节可以参考:[9] T. Akenine-M¨oller, E. Haines, and N. Hoffman, Real-Time Rendering, 3rd ed. AK Peters Ltd., 2008
Texture Map Memory
纹素被访问的顺序可以是与光栅化顺序有关的任何方向(The order of texels accessed in a texture map can have any orientation with respect to the rasterization order,不是很理解,列出原文)。如果纹素在贴图中以简单的行主序存储,纹理映射是水平进行的。缓存会保存很长的一条水平纹素提高命中率,但是如果纹理映射顺序旋转了90度那么,每一个像素都会丢失,每次访问都需要一次新的访存,读取新的一行,为了避免这种依赖朝向的纹理,纹理在内存中是以tile为单位保存的,或者是blocked。每一个纹理被分成n*n的tile,并且所有的纹素成组保存的。
研究显示如果要提高命中率,tile的尺寸需要和cacheline的尺寸一样大,128K或者256K,那么tile的大小就是8*8或者16*16
另外一个重要的概念是工作集尺寸working set size。Working Set Size指的是渲染一帧的图像分辨率( ’The Principle of Texture Thrift’ )研究显示,如果工作集匹配Cache丢失率会降低。
纹理缓存是只读的,因为他典型的使用就是放入三角形。但是使用GPU将计算的值放入纹理是一个常用的操作(RTT)。所以尽管他是只读的,他仍然可以改成可写的。如果纹理map改成了可写的,那么所有on-chip的对纹理的引用都会失效,然后GPU就可以写写入纹理了。也可以使用一个更简单的方法:直接刷新GPU的所有缓存。缓存失效是为了保证所有的缓存在一个一致状态。
Tile Rasterization
和一个内存中保存的是tilling的纹素一样,同样在光栅阶段tiling技术改进了纹理数据的访问顺序。一个简单的光栅化过程以行主序的方式生成像素,从三角形左边按行处理到右侧。每一个大的三角形一个纹理缓存进行填充,伴随像素按照逐行生成,并且进入下一行的时候上一行的像素已经丢弃了。这个水平的光栅化会造成纹理读取随着三角形宽度宽度变化。为了改进空间局部性,使用了tiled-rasterization,他会将屏幕分成等大小的矩形,通常的2的指数大小。每个tile逐个光栅化。
Texture Cache Architecture
纹理缓存的角色在出现了L2Cache的时候发生了变化。就Cache的尺寸而言,现代GPU的L1缓存的大小一般为:12KB,16KB等。L2分布在每一个DRAM通道上,通过cross Bar和L1相连。把一个L2 Cache放在内存控制器上,能够方便GPU进行规模的变化。设计内存架构的时候L2通常是线性内存(相对于根据纹理定制格式来说更好)。它就匀速L2Cache不知能把纹理当做Client还能用作别的内容的缓存。
其他的还有一些纹理并行和纹理压缩的问题。
Performance
纹理缓存的设计主要是为了性能。
如果纹理访问没有命中就需要重off-Chip的内存读取,会产生很大的延迟。为了隐藏延迟,需要需先计算需要的纹理地址,预先抓取缓存行。
略。