GPU架构
参考资料:
Introduction to GPU Architecture
概要
主要简单介绍GPU架构,已经架构带来的性能优化代码编写问题。
概念
同过总结上面的资料,大概梳理了相关内容。
Domain
一个完整的任务,可以理解为一次渲染程序的提交(包括一次vertex或者fragment)
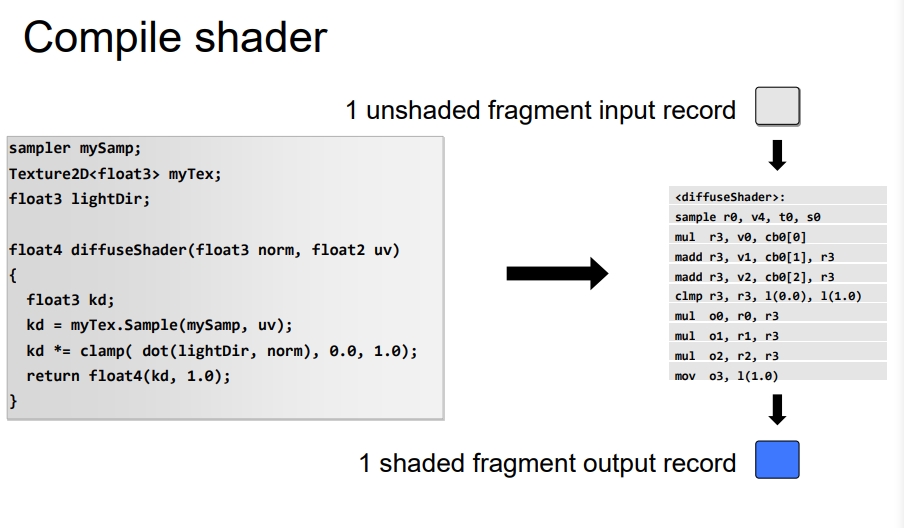
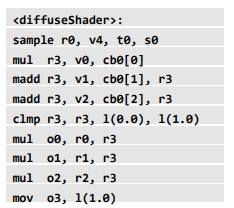
下面是一个片段着色器的编译结果。
下面是来自Unity内部的一段编译代码。
查看Unity的CompiledShader可以看一个Pass的一个vertex或者一个fragment可以算作一个Domain。
Shader Disassembly:
//
// Generated by Microsoft (R) D3D Shader Disassembler
// Input signature:
// Name Index Mask Register SysValue Format Used
// -------------------- ----- ------ -------- -------- -------
// POSITION 0 xyz 0 NONE float xyz
// Output signature:
// Name Index Mask Register SysValue Format Used
// -------------------- ----- ------ -------- -------- -------
// SV_Position 0 xyzw 0 POS float xyzw
vs_5_0
dcl_globalFlags refactoringAllowed
dcl_constantbuffer CB0[4], immediateIndexed
dcl_constantbuffer CB1[51], immediateIndexed
dcl_input v0.xyz
dcl_output_siv o0.xyzw, position
dcl_temps 4
0: mov r0.x, cb0[0].y
1: mov r0.y, cb0[1].y
2: mov r0.z, cb0[2].y
3: add r1.xyw, cb0[3].xyxz, -cb1[50].xyxz
4: mov r0.w, r1.y
5: mov r2.xyz, v0.xyzx
6: mov r2.w, l(1.000000)
7: dp4 r0.x, r0.xyzw, r2.xyzw
8: mul r0.xyzw, r0.xxxx, cb1[34].xyzw
9: mov r3.w, r1.x
10: mov r3.x, cb0[0].x
11: mov r3.y, cb0[1].x
12: mov r3.z, cb0[2].x
13: dp4 r3.x, r3.xyzw, r2.xyzw
14: mad r0.xyzw, cb1[33].xyzw, r3.xxxx, r0.xyzw
15: mov r1.x, cb0[0].z
16: mov r1.y, cb0[1].z
17: mov r1.z, cb0[2].z
18: dp4 r1.x, r1.xyzw, r2.xyzw
19: mad r0.xyzw, cb1[35].xyzw, r1.xxxx, r0.xyzw
20: add o0.xyzw, r0.xyzw, cb1[36].xyzw
21: ret
// Approximately 0 instruction slots used
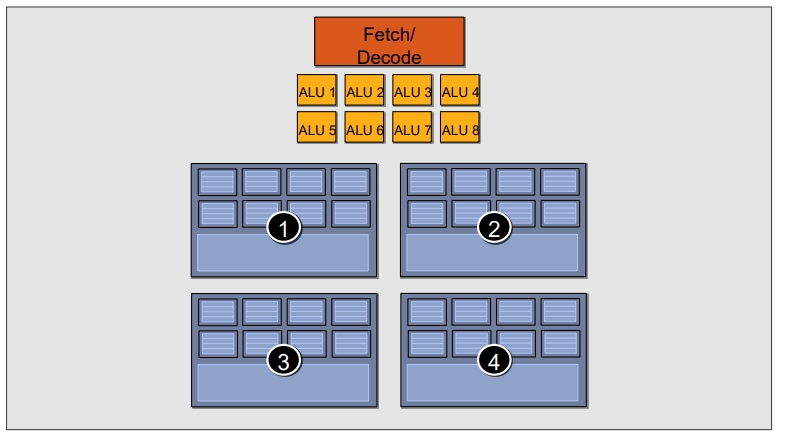
Domain的执行
要执行一个Domain需要一个类似CPU的处理器。

然后就可以逐行执行右侧的Domain。Execution Context是存储单元,ALU是计算单元,Fetch/Decode可以理解指令寄存器。
Workgroup
一个Domain可以划分成多个WorkGroup。WorkGroup之间独立互不依赖(有可能会产生依赖),放入同一个计算单元的多条指令可以理解为一个WorkGroup。

Workitem
Workgroup的一条指令我理解就是Workitem。
例如一个加法指令。
这些指令操作的是一个运算单元的不同部件。
而且在一个指令操作寄存器的时候,别的微指令可以操作累加器,这样的特点可以让运算单元进行指令流水。
SIMD units
如果我在不同的时间重复执行同一个指令四次(由四个16位宽的SIMD执行),那么就可以错开对寄存器的使用。如下图所示(图片来自上面的链接,暂时不看文字描述),这就算是指令流水。GPU当中主要是访问寄存器带来的指令流水

也就是单指令多数据 SIMD。
这时我们发现,我提交一条指令以后,虽然所有的部件都在进行运算,但是指令寄存器停滞了,也就是图中表示的wait。
为了让指令寄存器也提高利用率,GPU用了下面的方案:
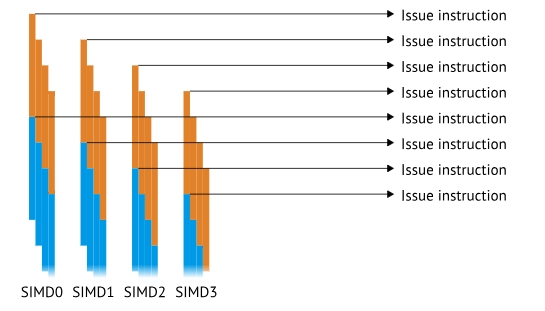
也就是一个指令寄存器(我猜的,可以能不是指的指令寄存器,但是就是上面的Issue Instruction)同时控制四组SIMD。上面的Issue Instruction是同一个,只不过控制了不同的SIMD。
上面是从执行时间上看的,我们从物理架构上看应该长这样:

因为要用同一个指令寄存器所以还要变成:
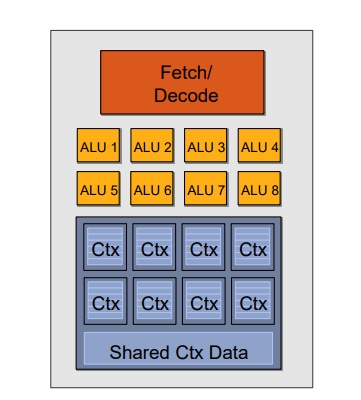
这是参考链接拿来的示意图,ALU和Ctx数量没有对上。
Compute units
总结来说:GPU的一个CU(计算单元),就是一个指令寄存器控制的多组SIMD单元。
每个CU内部的SIMD必须同时执行,所以一次指令会提交给四个SIMD,每个SIMD会通过类似指令流水执行四次,SIMD是16宽的,也就是一次同时处理16个数据。
Wavefront or Wave
一次完整的指令流水:16 * 4 * 4 / 4 ,一个CU的吞吐量就是64(一个指令对应一个时钟周期,一个时钟周期同时处理了64个数据)。看图的话实际上也是一个指令同时处理64个数据(这是最小的处理单元),这个叫做Wavefront 或者Wave
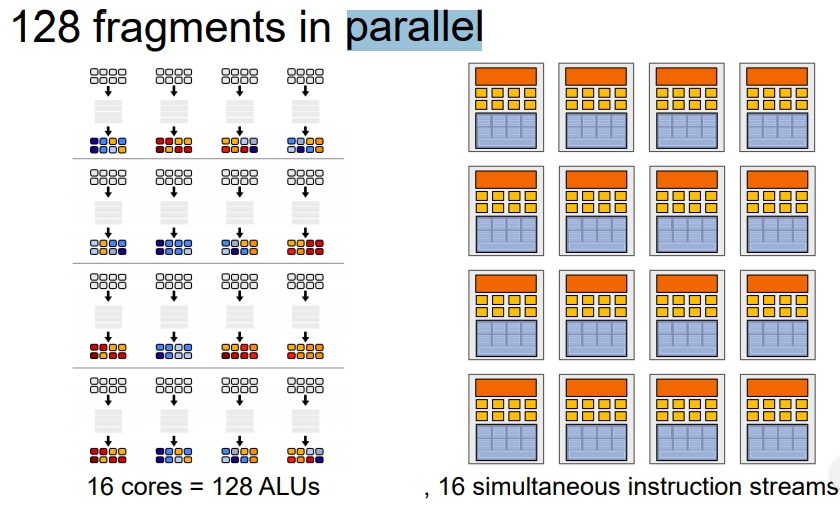
并行
下面是参考链接的一个并行架构示意图。
下面是执行的示意图。

在参考资料中有提到,一个向量寄存器和标量寄存器的使用比较。
在一个ALU当中,原本的指令会变成向量指令。
把指令向量化:

所以一个非uniform的vector变量类型,为了提高利用率,在一个CU当中需要占用16(float大小)*3(向量维度)*8(并行数)大小的寄存器。
所以一个ALU可以对应多组数据。
这个物理结构就和前面的寄存器流水结合起来了,一个ALU每次处理8组数据,分别切换1,2,3,4四组寄存器
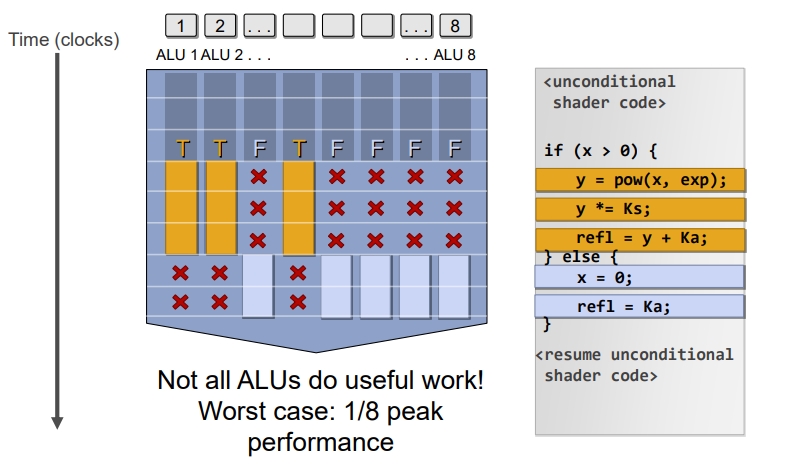
分支
如果并行程序中遇到分支:一个Wave的总耗时是不变的,只是通过遮盖的方式来不执行。
如下图如果遇到分支,首先会生成一个Mask,是针对每个ALU的(ALU逻辑运算单元,也是上面说的CU(Compute Unit) 而非CPU中的Control Unit)。
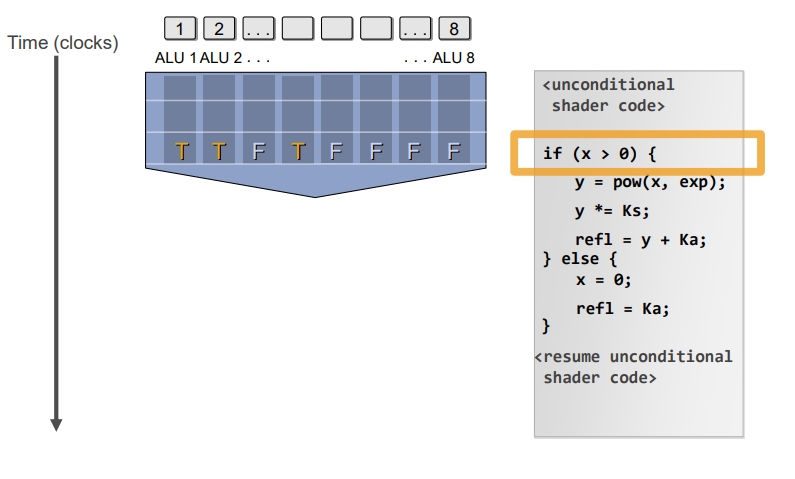
通过遮盖来切换分支,并没有节省时间。