Unity SRP实现SDF渲染框架
目前,接触到SDF和RayCasting相关的内容,花了一点时间通过SRP来构建一个SDF渲染pipeline。
这里主要介绍一下大概的过程。
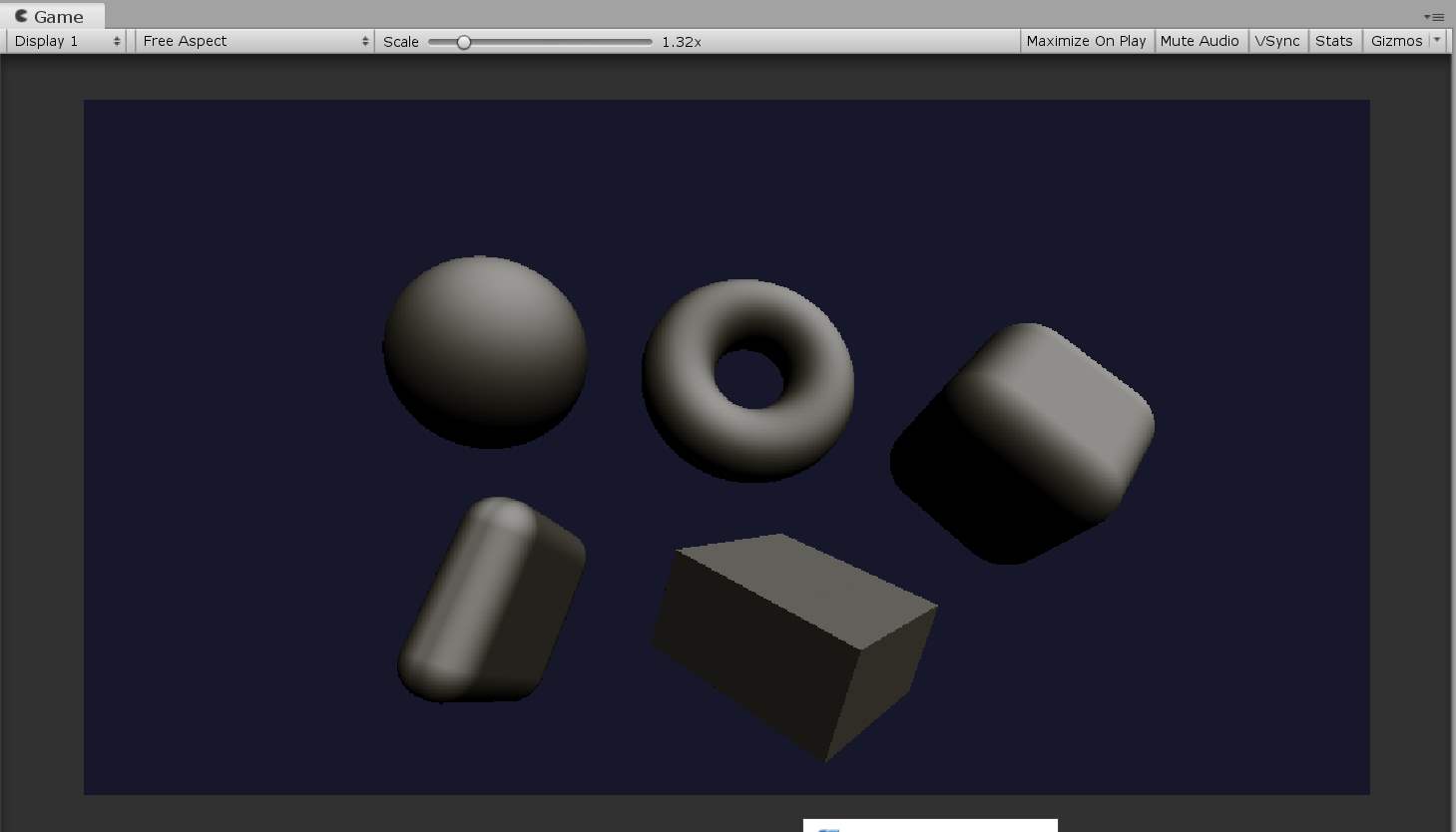
目前的结果:
SRP部分代码
全部代码如下,具体说明见注释:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using UnityEngine.Rendering;
using UnityEngine.Experimental.Rendering;
using UnityEngine.Experimental.Rendering;
public class SDFPipeline : UnityEngine.Rendering.RenderPipeline
{
ShaderTagId forwardBase;
// 相关的Shader和数据存储在asset当中。
private SDFPipelineAsset asset;
private Material sdfMat;
// 需要初始化一个LightMode名字,这个名字主要用来指定要渲染的pass。
public SDFPipeline(SDFPipelineAsset vasset)
{
asset = vasset;
sdfMat = new Material(asset.sdfRenderShader);
forwardBase = new ShaderTagId("ForwardBase");
}
// 渲染每一个Camera
protected override void Render(ScriptableRenderContext context, Camera[] cameras)
{
foreach (var camera in cameras)
{
Render(context, camera);
}
context.Submit();
}
// 针对每一个Camera的渲染
void Render(ScriptableRenderContext context, Camera camera)
{
// 进行模型剪裁。
ScriptableCullingParameters cullingParameters;
camera.TryGetCullingParameters(false, out cullingParameters);
CullingResults cull = context.Cull(ref cullingParameters);
/*
设置摄像机数据:其中的内容包括摄像机的unity_WorldToCamera,unity_CameraToWorld等矩阵
*/
context.SetupCameraProperties(camera); //设置Unity V 和 P矩阵
var buffer = new CommandBuffer { name = camera.name };
CameraClearFlags clearFlags = camera.clearFlags;
buffer.ClearRenderTarget(
(clearFlags & CameraClearFlags.Depth) != 0,
(clearFlags & CameraClearFlags.Color) != 0,
camera.backgroundColor
);
//
sdfMat.shader = asset.sdfRenderShader;
// 获取SDF代理体数据
int count = 0;
ComputeBuffer cb = SDFProxyObject.GetProxy(ref count);
// 设置相关矩阵参数。
buffer.SetGlobalBuffer(Shader.PropertyToID("SDFlist"),cb);
buffer.SetGlobalInt("I_SDFCount", count);
buffer.SetGlobalMatrix("M_WorldToCamera", camera.worldToCameraMatrix);
buffer.SetGlobalMatrix("M_Inv_WorldToCamera", camera.worldToCameraMatrix.inverse);
buffer.SetGlobalMatrix("M_Projection", GL.GetGPUProjectionMatrix(camera.projectionMatrix, camera.cameraType == CameraType.SceneView));
buffer.SetGlobalMatrix("M_Inv_Projection", GL.GetGPUProjectionMatrix(camera.projectionMatrix, camera.cameraType == CameraType.SceneView).inverse);
buffer.SetGlobalVector("V_CameraWPos", camera.transform.position);
// 进行SDF绘制,这里和HDRP的灯光一样一次性绘制所有的SDF数据。
buffer.Blit(BuiltinRenderTextureType.None, camera.targetTexture, sdfMat);
context.ExecuteCommandBuffer(buffer);
buffer.Release();
// 后面的内容 就是要在编辑器模式绘制矩形,为了方便编辑。
SortingSettings st = new SortingSettings(camera);
DrawingSettings ds = new DrawingSettings(forwardBase, st);
FilteringSettings fs = new FilteringSettings(new RenderQueueRange(0, 4000));
if(camera.cameraType == CameraType.SceneView)
{
context.DrawRenderers(
cull, ref ds, ref fs
);
}
context.Submit();
}
}
对应pipeline的asset。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using UnityEngine;
using UnityEngine.Experimental.Rendering;
using UnityEngine.Rendering;
[CreateAssetMenu(menuName = "Rendering/SDFPipeline")]
public class SDFPipelineAsset : RenderPipelineAsset, ISerializationCallbackReceiver
{
[SerializeField]
public Shader sdfRenderShader;
protected override UnityEngine.Rendering.RenderPipeline CreatePipeline()
{
return new SDFPipeline(this);
}
void ISerializationCallbackReceiver.OnAfterDeserialize()
{
return;
}
void ISerializationCallbackReceiver.OnBeforeSerialize()
{
return;
}
}
为了能够更加容易编辑内容,所以需要在Scene视图当中绘制简单的物体,同时用GameObject表示出来:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public struct SDFProxy
{
Matrix4x4 o2wMatrix;
Vector4 param;
public int SDFtype;
// 每一个SDF的代理体都需要一个数据,保存位置、形状参数等。
public SDFProxy(Matrix4x4 lTow, Vector4 lparam,int type)
{
o2wMatrix = lTow;
SDFtype = type;
param = lparam;
}
}
[ExecuteInEditMode]
public class SDFProxyObject : MonoBehaviour
{
public static List<SDFProxyObject> sdfObjlist;
public static List<SDFProxy> sdflist;
static ComputeBuffer cb;
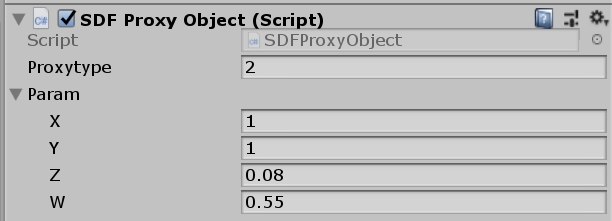
public int proxytype;
public Vector4 param;
// 获取代理体的方法
public static ComputeBuffer GetProxy(ref int count)
{
if (sdfObjlist ==null)
sdfObjlist = new List<SDFProxyObject>();
if (sdflist == null)
sdflist = new List<SDFProxy>();
sdflist.Clear();
if(cb == null)
cb = new ComputeBuffer(10000,System.Runtime.InteropServices.Marshal.SizeOf(typeof(SDFProxy)));
foreach (var obj in sdfObjlist)
{
sdflist.Add(new SDFProxy(obj.transform.worldToLocalMatrix, obj.param, obj.proxytype));
}
//性能提升 :提前排序減少分支,和HDRP一样
sdflist.Sort((d1, d2) => d1.SDFtype.CompareTo(d2.SDFtype));
cb.SetData<SDFProxy>(sdflist);
count = sdflist.Count;
return cb;
}
private void OnEnable()
{
if (sdfObjlist == null)
sdfObjlist = new List<SDFProxyObject>();
sdfObjlist.Add(this);
}
private void OnDisable()
{
if (sdfObjlist == null)
sdfObjlist = new List<SDFProxyObject>();
sdfObjlist.Remove(this);
}
}
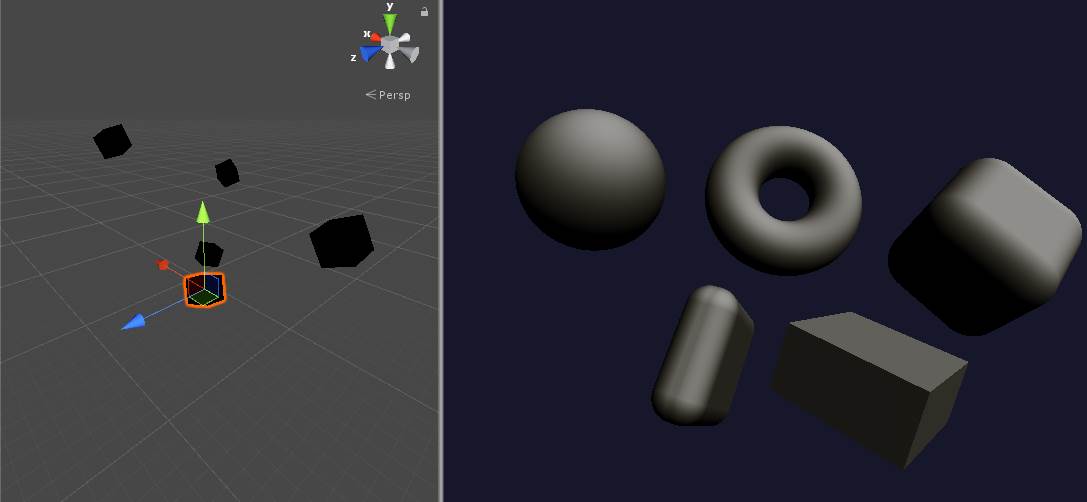
目前,Scene视图当中使用的是一个黑色的盒子,用于观察位置、进行旋转等操作:
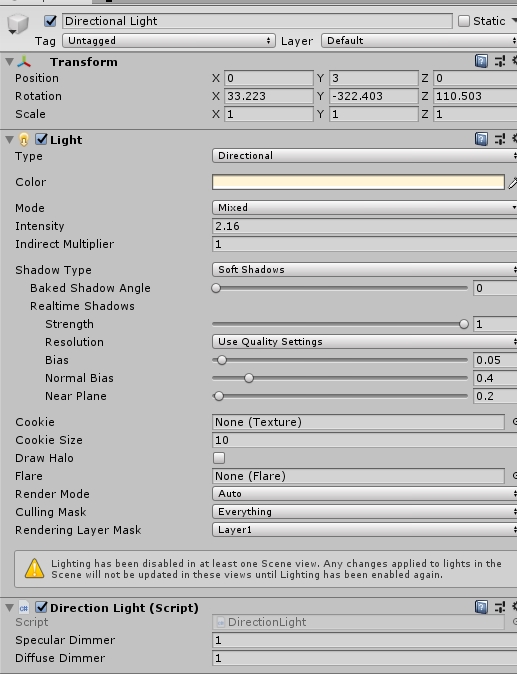
场景当中的灯光也需要设置,目前只设置了直线光,通过脚本把光照信息设置成全局的Shader变量:
SDF渲染Shader
下面是SDF的Shader片段着色器代码,这里只放基础部分的代码,省略优化部分的代码。
real4 frag (v2f i) : SV_Target
{
real3 rayDir = normalize(i.worldPos - V_CameraWPos);
// 背景色
real3 col = float3(0.1,0.1,0.2);
real t = 0;
real Pnum = 1;
for(int s = 0; s< 100; s++)
{
real d = 10;
int interact_id = 0;
// 遍历所有SDF数据,这部分可以预先计算相交,同时使用八叉树管理SDF代理体。
for(int p = 0; p < I_SDFCount; p++)
{
SDFProxy currSdf = SDFlist[p];
real3 raypos = t * rayDir+V_CameraWPos;
d = min(d,sdf(raypos, currSdf));
if(d <= 0.0001)
{
interact_id = p;
break;
}
}
if(d > 0.0001)
{
t += d;
}
else
{
// 相交后执行光照计算
real3 raypos = t * rayDir + V_CameraWPos;
col = saturate(dot(-rayDir, calcNormal(raypos, SDFlist[interact_id])));
col = brdf(calcNormal(raypos, SDFlist[interact_id]), normalize(-rayDir), (-_LightDirection));
break;
}
if(t > 100){
break;
}
}
return float4(col/ (1 + col), 1);
}
SDF的BRDF
#include "brdf.hlsl"
real3 brdf(float3 N, float3 V, float3 L)
{
float3 diffuse = 0;
float3 specular = 0;
float3 H = normalize(L + V);
float HdotN = dot(N,H);
float HdotL = dot(L,H);
float F0 = 0.54;
/*
float _Metallic;
float _Smoothness;
float3 _Diffuse;
float3 _LightPosition;
float3 _LightColor;
*/
// Fresnel 使用Schlick
float F = F_Schlick(F0 ,HdotL);
// 目前使用blinn Phong模型光照
specular = F * _LightIntensity *pow(saturate(dot(N,L)),5);
diffuse = _LightIntensity *_LightColor * _Diffuse * _LightColor * saturate(dot(N,L))/ 3.14159;
return diffuse * _DiffuseDimmer +
specular * _SpecularDimmer;
}
SDF的形状
最后是SDF,,这部分内容来自博客:
float dot2( in real3 v ) { return dot(v,v); }
float dot2( in real2 v ) { return dot(v,v); }
float sdSphere( real3 p, float s )
{
return length(p)-s;
}
float sdBox( real3 p, real3 b )
{
real3 d = abs(p) - b;
return length(max(d,0.0))
+ min(max(d.x,max(d.y,d.z)),0.0); // remove this line for an only partially signed sdf
}
float sdRoundBox( real3 p, real3 b, float r )
{
real3 d = abs(p) - b;
return length(max(d,0.0)) - r
+ min(max(d.x,max(d.y,d.z)),0.0); // remove this line for an only partially signed sdf
}
float sdTorus( real3 p, real2 t )
{
real2 q = real2(length(p.xz)-t.x,p.y);
return length(q)-t.y;
}
float sdCappedTorus(in real3 p, in real2 sc, in float ra, in float rb)
{
p.x = abs(p.x);
float k = (sc.y*p.x>sc.x*p.y) ? dot(p.xy,sc) : length(p.xy);
return sqrt( dot(p,p) + ra*ra - 2.0*ra*k ) - rb;
}
float sdCylinder( real3 p, real3 c )
{
return length(p.xz-c.xy)-c.z;
}
float sdCone( real3 p, real2 c )
{
// c must be normalized
float q = length(p.xy);
return dot(c,real2(q,p.z));
}
float sdPlane( real3 p, real4 n )
{
// n must be normalized
return dot(p,n.xyz) + n.w;
}
float sdHexPrism( real3 p, real2 h )
{
const real3 k = real3(-0.8660254, 0.5, 0.57735);
p = abs(p);
p.xy -= 2.0*min(dot(k.xy, p.xy), 0.0)*k.xy;
real2 d = real2(
length(p.xy-real2(clamp(p.x,-k.z*h.x,k.z*h.x), h.x))*sign(p.y-h.x),
p.z-h.y );
return min(max(d.x,d.y),0.0) + length(max(d,0.0));
}
float sdTriPrism( real3 p, real2 h )
{
real3 q = abs(p);
return max(q.z-h.y,max(q.x*0.866025+p.y*0.5,-p.y)-h.x*0.5);
}
float sdCapsule( real3 p, real3 a, real3 b, float r )
{
real3 pa = p - a, ba = b - a;
float h = clamp( dot(pa,ba)/dot(ba,ba), 0.0, 1.0 );
return length( pa - ba*h ) - r;
}
float sdVerticalCapsule( real3 p, float h, float r )
{
p.y -= clamp( p.y, 0.0, h );
return length( p ) - r;
}
float sdCappedCylinder( real3 p, real2 h )
{
real2 d = abs(real2(length(p.xz),p.y)) - h;
return min(max(d.x,d.y),0.0) + length(max(d,0.0));
}
float sdRoundedCylinder( real3 p, float ra, float rb, float h )
{
real2 d = real2( length(p.xz)-2.0*ra+rb, abs(p.y) - h );
return min(max(d.x,d.y),0.0) + length(max(d,0.0)) - rb;
}
float sdCappedCone( in real3 p, in float h, in float r1, in float r2 )
{
real2 q = real2( length(p.xz), p.y );
real2 k1 = real2(r2,h);
real2 k2 = real2(r2-r1,2.0*h);
real2 ca = real2(q.x-min(q.x,(q.y < 0.0)?r1:r2), abs(q.y)-h);
real2 cb = q - k1 + k2*clamp( dot(k1-q,k2)/dot2(k2), 0.0, 1.0 );
float s = (cb.x < 0.0 && ca.y < 0.0) ? -1.0 : 1.0;
return s*sqrt( min(dot2(ca),dot2(cb)) );
}
float sdRoundCone( in real3 p, in float r1, float r2, float h )
{
real2 q = real2( length(p.xz), p.y );
float b = (r1-r2)/h;
float a = sqrt(1.0-b*b);
float k = dot(q,real2(-b,a));
if( k < 0.0 ) return length(q) - r1;
if( k > a*h ) return length(q-real2(0.0,h)) - r2;
return dot(q, real2(a,b) ) - r1;
}
float sdEllipsoid( in real3 p, in real3 r )
{
float k0 = length(p/r);
float k1 = length(p/(r*r));
return k0*(k0-1.0)/k1;
}
float sdOctahedron( in real3 p, in float s)
{
p = abs(p);
float m = p.x+p.y+p.z-s;
real3 q;
if( 3.0*p.x < m ) q = p.xyz;
else if( 3.0*p.y < m ) q = p.yzx;
else if( 3.0*p.z < m ) q = p.zxy;
else return m*0.57735027;
float k = clamp(0.5*(q.z-q.y+s),0.0,s);
return length(real3(q.x,q.y-s+k,q.z-k));
}
float sdOctahedron_Bound( in real3 p, in float s)
{
p = abs(p);
return (p.x+p.y+p.z-s)*0.57735027;
}
float udTriangle( real3 p, real3 a, real3 b, real3 c )
{
real3 ba = b - a; real3 pa = p - a;
real3 cb = c - b; real3 pb = p - b;
real3 ac = a - c; real3 pc = p - c;
real3 nor = cross( ba, ac );
return sqrt(
(sign(dot(cross(ba,nor),pa)) +
sign(dot(cross(cb,nor),pb)) +
sign(dot(cross(ac,nor),pc))<2.0)
?
min( min(
dot2(ba*clamp(dot(ba,pa)/dot2(ba),0.0,1.0)-pa),
dot2(cb*clamp(dot(cb,pb)/dot2(cb),0.0,1.0)-pb) ),
dot2(ac*clamp(dot(ac,pc)/dot2(ac),0.0,1.0)-pc) )
:
dot(nor,pa)*dot(nor,pa)/dot2(nor) );
}
float udQuad( real3 p, real3 a, real3 b, real3 c, real3 d )
{
real3 ba = b - a; real3 pa = p - a;
real3 cb = c - b; real3 pb = p - b;
real3 dc = d - c; real3 pc = p - c;
real3 ad = a - d; real3 pd = p - d;
real3 nor = cross( ba, ad );
return sqrt(
(sign(dot(cross(ba,nor),pa)) +
sign(dot(cross(cb,nor),pb)) +
sign(dot(cross(dc,nor),pc)) +
sign(dot(cross(ad,nor),pd))<3.0)
?
min( min( min(
dot2(ba*clamp(dot(ba,pa)/dot2(ba),0.0,1.0)-pa),
dot2(cb*clamp(dot(cb,pb)/dot2(cb),0.0,1.0)-pb) ),
dot2(dc*clamp(dot(dc,pc)/dot2(dc),0.0,1.0)-pc) ),
dot2(ad*clamp(dot(ad,pd)/dot2(ad),0.0,1.0)-pd) )
:
dot(nor,pa)*dot(nor,pa)/dot2(nor) );
}