HDRP Shader当中的坐标系变化矩阵
在HDRP当中Shader当中所有的内置矩阵(例如:UNITY_MATRIX_M)都发生了变化。这部分内容不再通过内置的代码设置,而是在SRP当中设置,我们可以看到这些参数是如何传递到Shader当中的。下面详细介绍写的坐标系变化矩阵。
C#设置部分
先来看一下矩阵传入Shader的c#代码:
略
Shader当中的基础坐标变化
在一个Shader中最基础的就是模型坐标到剪裁空间 :
TransformObjectToWorld(v.vertex); // UNITY_MATRIX_M
TransformWorldToHClip(positionWS); // UNITY_MATRIX_VP
HDRP中,目前我看到的是没有了UNITY_MATRIX_MVP而是需要两步转化。
Shader当中坐标系变换
Shader当中坐标系宏定义的位置
在文件ShaderVariablesMatrixDefsHDCamera.hlsl中保存的是和摄像机相关的矩阵的宏,如下。
#ifdef UNITY_SHADER_VARIABLES_MATRIX_DEFS_LEGACY_UNITY_INCLUDED
#error Mixing HDCamera and legacy Unity matrix definitions
#endif
#ifndef UNITY_SHADER_VARIABLES_MATRIX_DEFS_HDCAMERA_INCLUDED
#define UNITY_SHADER_VARIABLES_MATRIX_DEFS_HDCAMERA_INCLUDED
#if defined(USING_STEREO_MATRICES)
#define UNITY_MATRIX_V _ViewMatrixStereo[unity_StereoEyeIndex]
#define UNITY_MATRIX_I_V _InvViewMatrixStereo[unity_StereoEyeIndex]
#define UNITY_MATRIX_P OptimizeProjectionMatrix(_ProjMatrixStereo[unity_StereoEyeIndex])
#define UNITY_MATRIX_I_P _InvProjMatrixStereo[unity_StereoEyeIndex]
#define UNITY_MATRIX_VP _ViewProjMatrixStereo[unity_StereoEyeIndex]
#define UNITY_MATRIX_I_VP _InvViewProjMatrixStereo[unity_StereoEyeIndex]
#define UNITY_MATRIX_UNJITTERED_VP _ViewProjMatrixStereo[unity_StereoEyeIndex] // Since VR doesn't need to add jitter, just use normal VP matrix
#define UNITY_MATRIX_PREV_VP _PrevViewProjMatrixStereo[unity_StereoEyeIndex]
#else
#define UNITY_MATRIX_V _ViewMatrix
#define UNITY_MATRIX_I_V _InvViewMatrix
#define UNITY_MATRIX_P OptimizeProjectionMatrix(_ProjMatrix)
#define UNITY_MATRIX_I_P _InvProjMatrix
#define UNITY_MATRIX_VP _ViewProjMatrix
#define UNITY_MATRIX_I_VP _InvViewProjMatrix
#define UNITY_MATRIX_UNJITTERED_VP _NonJitteredViewProjMatrix
#define UNITY_MATRIX_PREV_VP _PrevViewProjMatrix
#endif // USING_STEREO_MATRICES
#endif // UNITY_SHADER_VARIABLES_MATRIX_DEFS_HDCAMERA_INCLUDED
在ShaderVariables.cginc中保存了所有原始矩阵的定义,如下:
// ================================
// PER FRAME CONSTANTS
// ================================
#if !defined(USING_STEREO_MATRICES)
float4x4 glstate_matrix_projection;
float4x4 unity_MatrixV;
float4x4 unity_MatrixInvV;
float4x4 unity_MatrixVP;
float4 unity_StereoScaleOffset;
int unity_StereoEyeIndex;
#endif
// ================================
// PER VIEW CONSTANTS
// ================================
// TODO: all affine matrices should be 3x4.
float4x4 _ViewMatrix;
float4x4 _InvViewMatrix;
float4x4 _ProjMatrix;
float4x4 _InvProjMatrix;
float4x4 _ViewProjMatrix;
float4x4 _InvViewProjMatrix;
float4x4 _NonJitteredViewProjMatrix;
float4x4 _PrevViewProjMatrix; // non-jittered
...
float4x4 GetRawUnityObjectToWorld() { return unity_ObjectToWorld; }
float4x4 GetRawUnityWorldToObject() { return unity_WorldToObject; }
#define UNITY_MATRIX_M ApplyCameraTranslationToMatrix(GetRawUnityObjectToWorld())
#define UNITY_MATRIX_I_M ApplyCameraTranslationToInverseMatrix(GetRawUnityWorldToObject())
可以看到所有的View变化和投影变换都设置了对应的逆矩阵,方便了我们进行操作。
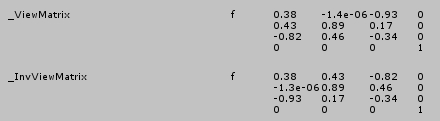
这里需要重要说明的是UNITY_MATRIX_V矩阵和 UNITY_MATRIX_I_V矩阵忽略了摄像机的平移。而UNITY_MATRIX_M和UNITY_MATRIX_I_M 加入了摄像机的平移。也就是说用这组矩阵是无法从摄像机空间恢复出真实的世界坐标的。也无法从世界坐标转换到真实的摄像机坐标的,模型坐标到世界坐标也是同理。
UNITY_MATRIX_V和UNITY_MATRIX_I_V矩阵内容如下图,可以看到平移分量没有了。
如果我们想要从深度中恢复真实的世界坐标要使用:unity_MatrixV矩阵。
如果要用模型坐标得到世界坐标怎么办?我们用ShaderGraph来制作一个直接输出世界坐标的Graph。如下图:
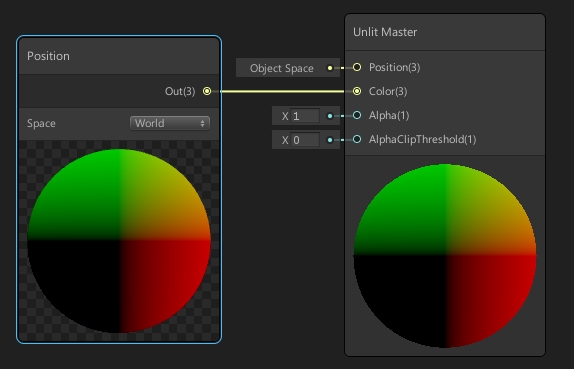
通过查看生成的代码,ShaderGraph的制作方案是:
// 首先通过矩阵计算有摄像机偏移的世界坐标。
UNITY_MATRIX_M
// 然后通过下面这个函数去除掉摄像机的影响,得到真实的世界坐标。
float3 GetAbsolutePositionWS(float3 positionRWS)
{
#if (SHADEROPTIONS_CAMERA_RELATIVE_RENDERING != 0)
positionRWS += _WorldSpaceCameraPos;
#endif
return positionRWS;
}
还有一个地方需要注意,在UnityHDRP的Shader当中有命名为positionRWS的世界坐标,R的意思就是说这个世界坐标包含了相对于摄像机的位移。